Päivitty muunnin toimii versioiden 5.4.x kanssa ja sen voi ladata täältä: http://www.3d-system.net/files/scan.zip.
Suurin ongelma keilausdatan käsittelyssä 3D-Win-ohjelmalla on pisteiden suuri määrä ja 3D-Winin suhteellisen raskas pisterakenne, joka on suunniteltu tukemaan kaikkia mahdollisia vastaan tulevia formaatteja. Rakennetta saatiin kevennettyä hieman versioon 5.4, mutta miljoonien pisteiden LAS-tiedostot ovat edelleen ongelmallisia. Pelkkä tietokoneen muistin laajennuskaan ei välttämättä auta, koska 32-bittisissä systeemeissä yksittäinen sovellus saa käyttöönsä maksimissaan vain 2Gt muistia.
Ratkaisuna ongelmaan on tässä vaiheessa pisteiden suodattaminen jo lukuvaiheessa. Tähän on nyt neljä tapaa: vanhat pisteiden poimiminen tietyin välein ja aluerajaus sekä uudet suodatus poisteiden ominaisuuksien perusteella ja suodatus ruuduittain.
Pisteiden poimiminen tietyin otantavälein on edelleen mukana ja on käyttökelpoinen aineiston alustavaan tarkasteluun ja suodatusvaihtoehtojen testaukseen. Esimerkiksi joka sadannen pisteen poimiminen kymmenen miljoonan pisteen aineistosta käy nopeasti ja antaa hyvän yleiskuvan aineistosta.
Aluerajauksen minimien ja maksimien antaminen muuntimen asetuksiin toimii pääsääntöisesti kuten muissakin muuntimissa. Tätä on optimoitu niin, että alueen ulkopuolelle jäävät pisteet ohitetaan jo lukuvaiheessa. Muilla muuntimillahan tämä tehdään vasta jälkeenpäin.
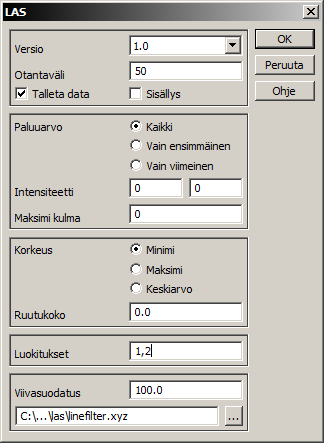
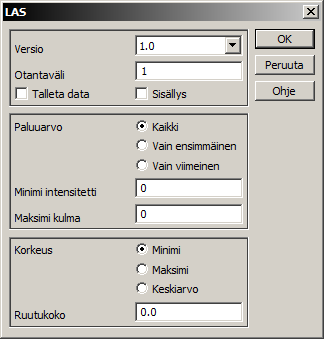
Suodatus pisteiden ominaisuuksien perusteella tapahtuu sisältötoiminnon ja formaatin asetusten kautta. Sisältötoiminnolla voidaan valita pisteet luokittelun perusteella. Esimerkiksi voidaan lukea vain luokkaan 2 (ground) kuuluvat pisteet. Tämän lisäksi voidaan formaatin asetuksista valita suodatus paluuarvon, minimi-intensiteetin tai maksimikulman perusteella. Paluuarvon suodatuksessa on toistaiseksi vain kaksi vaihtoehtoa: saman signaalin useista paluuarvoista poimitaan vain joko ensimmäinen tai viimeinen.
Ruuduittain suodatus astuu voimaan, jos asetuksiin annetaan ruutukoko. Käytännössä homma toimii niin, että koko aineisto luetaan kevyeen pisterakenteeseen, järjestetään koordinaattien mukaan ja suodatetaan ruuduittain. Jokaiseen ruutuun jätetään aina yksi piste. Jos valittuna on minimi tai maksimi, jätetään piste jonka Z-koordinaatti on pienin tai suurin. Jos valittuna on keskiarvo, lasketaan ruudun pisteiden koordinaateista keskiarvo ja talletetaan se.
Kaikki neljä suodatustapaa toimivat yhdessä. Ensimmäisenä tehdään suodatus pisteiden luokittelun ja ominaisuuksien mukaan. Seuraavaksi tarkistetaan aluerajat ja jäljelle jääneistä pisteistä poimitaan otantavälin mukaiset. Ruutusuodatus tehdään viimeisenä.
Oletuksena luetuille pisteille talletetaan muistin säästämiseksi vain luokittelu kenttään T3. Jos Talleta data -rasti laitetaan päälle, pisteelle tallettuvat myös muuut alkuperäisten pisteiden tiedot seuraavasti:
- Kenttä T4 - Lähdetiedoston tunnus (Source ID)
- Kenttä T5 - Intensitetti (Intensity)
- Kenttä T6 - Kulma (Scan Angle Rank)
- Ominaisuus LASFLAG - Liput (Scan Flags: return number, number of returns, scan direction, edge of flight line)
- Ominaisuus USERDATA - Vapaa data (User Data)
LAS-tiedostojen kirjoituksen pitäisi nyt toimia, mutta sitä ei vielä ole testattu muilla LAS-formaattia ymmärtävillä ohjelmilla. Palautetta otetaan vastaan.